+
+ 
This Scratch extension lets you:
- Control the movement of the Poppy Ergo Jr. robot
- Record the movement of the robot
- Capture images
- Recognise numbers from the camera
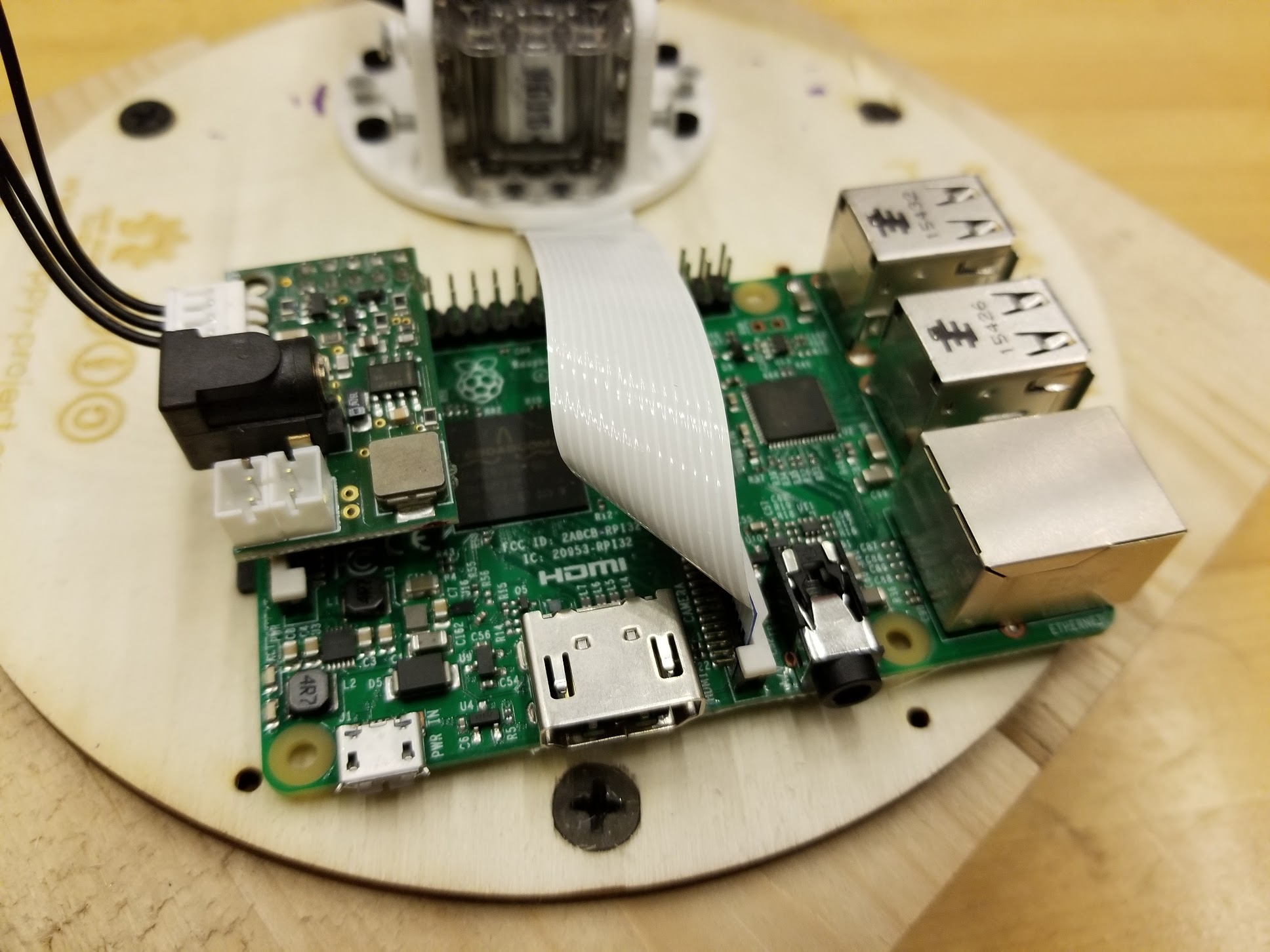
The open-source Poppy Ergo Jr robot was developed by the Flowers lab at Inria, France (https://www.poppy-project.org and https://www.poppy-education.org, CC-BY-SA)